|
|
|
Quicktime VR
Mother Goose Mission Technology
Mission NarrativeIntroductionMother Goose is a robotic mission that is designed to mimic the behavior of a field biologist looking for evidence of life on Mars. We know from studies of Earth that if there has been biological activity on Mars, recently or in the distant past, it probably has left tell tail signs in terms of physical appearances as well as chemical changes in the surface minerals. Some of these may be hard to find and might occur only in safe places that are sheltered and supported by the natural environment. The search for biosignatures of past life and protected niches that may harbor existing life on Mars depends the ability to recognize structures, textures, substances and data sets at widely varying spatial scales. The single most daunting challenge is narrowing down the search field from the planetary and regional scale to the level at which microscopy and analytical techniques can be useful. To do this by remote control from Earth is enormously inefficient and impractical, however it is feasible for a robotic system to do this if it is able to make decisions in real time and follow the evidence. The goal of the Mother Goose mission is to implement robotic systems with the necessary sensors and mobility that mimic the activities if a field biologist who might make observations at different spatial scales varying from aerial views down to the microscopic, and using instruments that are appropriate to each level including imaging and remote sensing, spectroscopy and chemical and gas sensors, panorama cameras, hand lenses and microscopes. The robotic mobility must be capable of supporting the need for access along the entire continuum of sequentially finer resolutions. Mission ArchitectureThe Mother Goose architecture employs a glider to perform aerial reconnaissance, a rover to make intermediate level observations, and micro-rovers to do microscopic examinations and to access difficult to reach locations.
The Mother Goose Mission will perform intelligent site selection at all levels
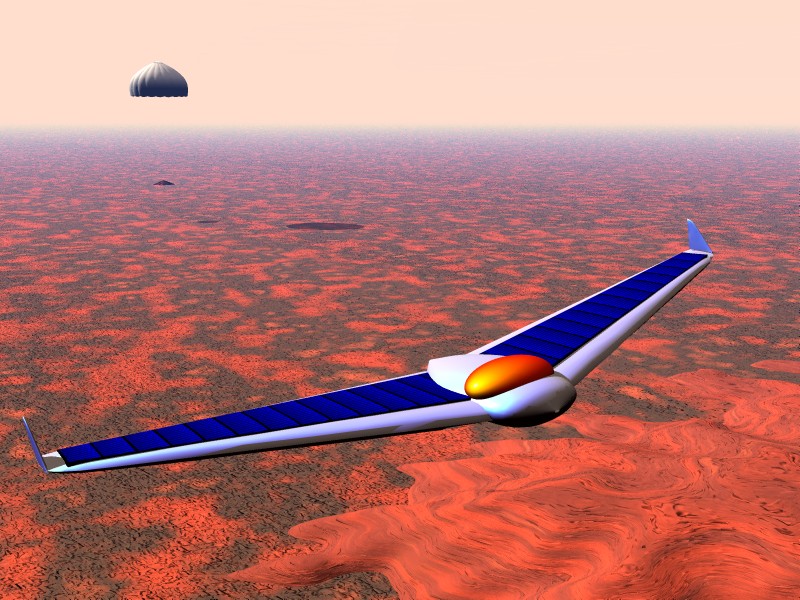
The heart of the Mother Goose flight system is a computer housed in a robot that both pilots the plane and transforms into a walker on the ground. We now join Mother Goose as she approaches Mars...As the spacecraft decelerates in the Martian atmosphere, Mother Goose is deployed in a glider that can cruise for up to several hours making observations and remote sensing measurements to locate water, warm spots and visual features that may have biological significance.
Mother Goose is a very bright bird. She flies the glider, collects the remote
To perform her duties Mother Goose uses preprogrammed maps and knowledge obtained from prior Mars missions, remote sensing images and data obtained during her descent, and realtime sensory data acquired from her sensors and those of the goslings on the ground. All navigational, environmental and scientific clues are combined in her unified world view. The goslings are networked with Mother Goose and each other and she is in constant touch with her brood commanding their movements and receiving their data. Mother Goose carries on a dialog with Mission Control and uploads data as time and transmission opportunities permit. She can talk directly with Earth at a very low data rate, she can talk to a Mars orbiter at medium data rates if it is overhead, and she can relay data at high speed via the flying wing that has the benefit of a large solar array to power its transceivers. Mother Goose herself has a small high efficiency photo voltaic array on her back but may from time to time return to the big wing for recharging and fast data transfers. When transmissions are impossible, Mother Goose operates autonomously storing data in her terra byte flash memory. Since her memory is nonvolatile, if Mother Goose should die, her body or her memory could be retrieved by a future mission.
Because of the long communications delay with Earth, the Mother Goose intelligent avionics system must choose a safe landing site near a region of scientific interest and execute the landing autonomously. During landing the glider's ground penetrating radar system will be switched to obtain flight data to aid in performing a stall maneuver that avoids the need for a runway. Air filled baffles in the inflatable glider's body will help absorb any shock from the final drop to the ground in the Mars 1/3 gravity.
Upon landing, Mother Goose, carrying knowledge of the region obtained from
observations during her descent, transforms into a walker and climbs from
the glider to begin assessing the area and planning the details of her
trek to the science site.
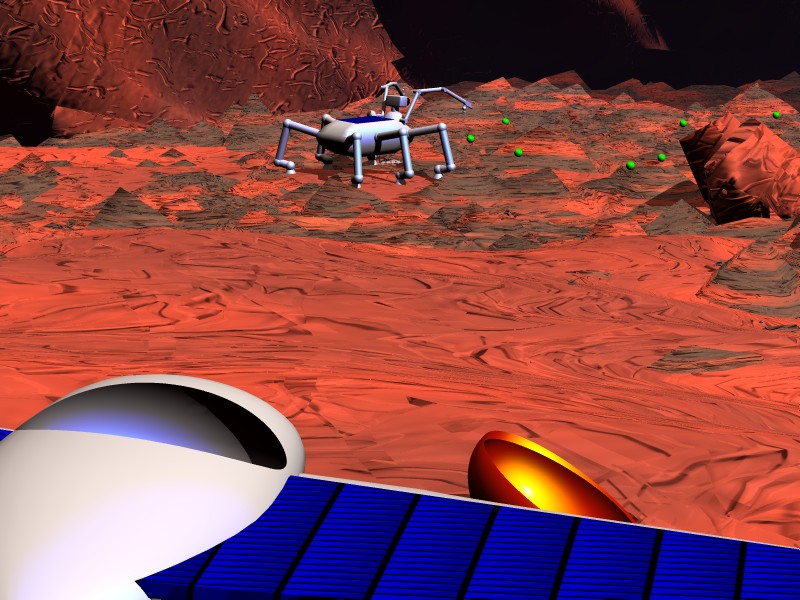
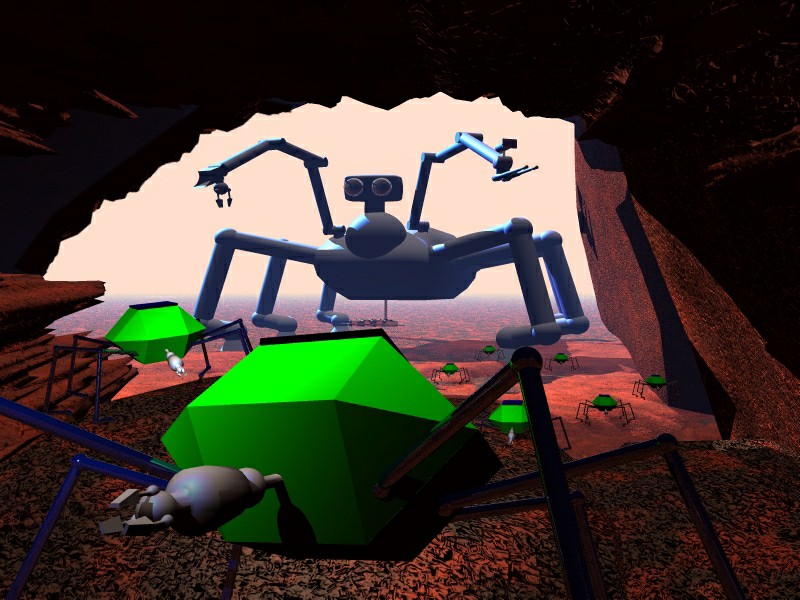
Tucked safely in little egg crate carriers inside of the Mother Goose walker are her goslings, a group of tiny micro-rovers outfitted with imagers and analyzers that can be deployed wherever she decides. Once at the science site she will begin detailed investigations making observations and testing the soil, and looking for physical settings and niches that might harbor or be attractive to living organisms. In consultation with Earth, Mother Goose can dispatch her goslings to fan out over an interesting area to do network science taking detailed chemical measurements at multiple points to test the minerals for signs of a biological history.
Alternatively the micro-rover goslings may be sent one by one into interesting
If possible the goslings will return for recharging on the Mother Goose rover who will carry them off to the next science site in the area. For certain tasks the goslings may not be able to return and are considered expendable, having given their lives for science. Our architecture is highly flexible and allows us to target anything from the polar layered terrain, to canyons and lake beds, to lava tubes that might occur around a volcano. About Our TechnologyThe heart of our guidance technology is call LEIF (Landing Enabled by Intelligent Functions) named after Leif Ericsson who discovered America some 500 years before Columbus. LEIF is being developed by Equinox Interscience, Inc, of Pinecliff, Colorado the lead technology organization for Mother Goose. Equinox is orchestrating the cooperative efforts of more than a dozen high technology companies from around the Denver Metro area and elsewhere for the Mother Goose concept study. LEIF is an advanced autonomous guidance and hazard avoidance technology being developed by Equinox that integrates navigation and science cues obtained from its remote sensing systems to enable a safe landing near scientifically desirable locations. This is a unique approach because navigation and science functions are normally not integrated in a common spaceflight system however we consider this a necessary step in the advancement of intelligent lander technology. |

 of encounter. Most of the detailed and time critical decisions will be made
autonomously by the robotic system itself with only high level supervisory
decisions being made by humans back on Earth.
of encounter. Most of the detailed and time critical decisions will be made
autonomously by the robotic system itself with only high level supervisory
decisions being made by humans back on Earth.
 The general region to which the mission is targeted has been carefully
chosen from an analysis of data and images from previous Mars missions.
Once the glider has been deployed over this region, Mother Goose begins
to survey the area for localities that show indications of conditions
that best fit the criteria for potential abodes for life and that have
suitable terrain to permit a safe landing.
The general region to which the mission is targeted has been carefully
chosen from an analysis of data and images from previous Mars missions.
Once the glider has been deployed over this region, Mother Goose begins
to survey the area for localities that show indications of conditions
that best fit the criteria for potential abodes for life and that have
suitable terrain to permit a safe landing.